4.1.1 Overview
Author(s): Lennart Lindegren
The astrometric processing, as envisaged and designed before the launch of Gaia, is described in some detail in Lindegren et al. (2012). This reference is still very relevant, but confrontation with real data and a continuing maturing of concepts have resulted in many changes, and this chapter provides an updated description.
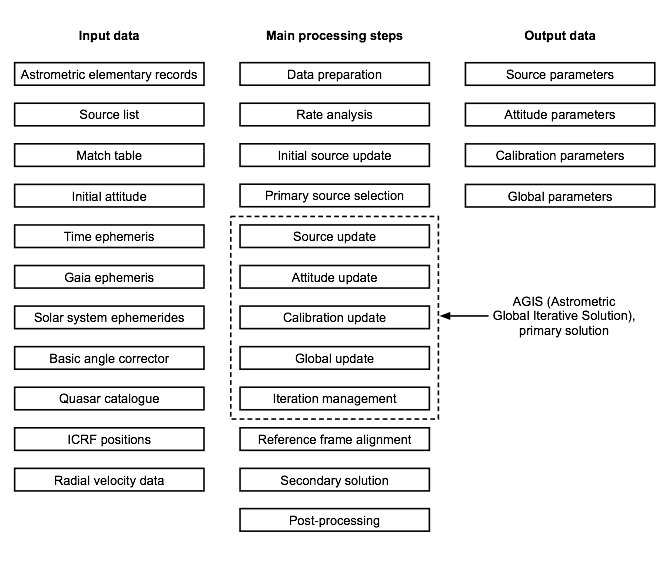
A schematic overview of the astrometric processing is given in Figure 4.1. The main objective of the astrometric processing is to estimate, as accurately as reasonably possible, a set of parameters representing the sources, the attitude, and the geometric calibration of the instrument. Optionally, a set of global parameters may also be estimated. These are the output data in Figure 4.1.
This objective is achieved by means of a complex processing chain applied to the input data represented in the left part of the figure and further described below. The core part of the processing is the Astrometric Global Iterative Solution (AGIS), which performs a weighted least-squares adjustment of the global astrometric model to the CCD observations by iteratively adjusting the output parameters. This adjustment only uses a subset of primary sources (about 14.3 million for Gaia DR3), which is sufficient to estimate the common parameters (attitude, calibration, global); once this has been achieved, the astrometric parameters of any source can be determined by means of a secondary solution or update.
The astrometric processing uses a coordinate system known as the Barycentric Coordinate Reference System (BCRS; Section 4.1.3). It has its origin at the solar-system barycentre (typically within two solar radii of the Sun’s position). Its axes are non-rotating with respect to objects at cosmological distances and coincide with those of the International Celestial Reference Frame (ICRS; Arias et al. 1995). The time coordinate of the BCRS is the barycentric coordinate time (TCB).
The main input data are:
-
•
Astrometric elementary records (AstroElementaries): These are the ‘observations’ to which the global astrometric model is fitted. Each record contains the image parameters (centroid coordinates and flux) from the SM and AF measurements of one detected source across the field of view (transit). Each record has a unique transit identifier. The AstroElementaries are generated by the IDT (Section 3.4.2) or IDU (Section 3.4.2).
-
•
Source list: This is the current list of sources used by the DPAC processing. Contrary to Gaia DR1, which used an initial source list compiled from pre-existing, mainly ground-based catalogues, the source lists for Gaia DR2 and Gaia DR3 were created purely from Gaia observations through the crossmatch processing (Section 3.4.13). Each source has a unique source identifier. The current list contains about 2.5 billion sources; for about 89.5% of them the same source identifier was used in Gaia DR2, while the remaining have new identifiers. Many of the ‘new’ sources coincide positionally with sources in an earlier data release, but have new identifiers because they were created by merging or splitting the observations used for the corresponding sources in the earlier release. The list still contains many spurious, duplicated, or insufficiently observed sources which are not retained in the output catalogue.
-
•
Match table: This table links every astrometric elementary record (transit identifier) to a source identifier. Usually several transits are linked to the same source. The match table is created by the crossmatch processing (Section 3.4.13).
-
•
Initial attitude: This is an approximation of the attitude from which the attitude update starts. It is needed because the transformation from attitude parameters to the observed quantities is highly non-linear, and the attitude update, based on the linearised transformation, only works if the errors are rad. In the cyclic processing the attitude estimate from the previous cycle may be used; otherwise the commanded attitude provides a sufficiently good starting approximation (Section 3.4.5).
-
•
Time ephemeris: This provides the relation between the time measured by the on-board clock, represented by the on-board mission time line (OBMT), and the barycentric coordinate time (TCB), which is the time scale used for all the astrometric processing.
-
•
Gaia ephemeris: This provides the position and velocity of Gaia in the BCRS. The velocity of Gaia is needed to take into account stellar aberration, while the position is needed to compute parallax and the gravitational deflection affecting the observations. The construction of the Gaia ephemeris is described in Section 4.2.3.
-
•
Solar-system ephemerides: These provide positions in the BCRS of the Sun, eight major planets, and the moon. They are principally needed to compute the gravitational deflection caused by these bodies. Their construction is described in Section 4.2.1.
-
•
Basic angle corrector: This contains the correction to the basic angle, as a function of time, based on data from the Basic Angle Monitor (BAM). The BAM data are analysed off-line (see Section 4.2.4) and fitted to a model that allows both a smooth component (represented by a cubic spline) and discrete jumps. These values are later improved by AGIS as part of the geometric calibration update or global update.
-
•
Quasar catalogue: This is a list of sources that have a high probability of being quasars (AGNs). It is needed for establishing a non-rotating system of proper motions as described in Section 4.3.2. The list is available in Gaia DR3 as the table frame_rotator_source and contains a total of 429 249 sources obtained by cross-matching AGIS2.2 with ICRF3-SX (see below) and with the AllWISE AGNs from Secrest et al. (2015, 2016), followed by astrometric filtering. There are 2269 VLBI sources from ICRF3-SX, 428 564 sources from AllWISE, and 1584 sources that are in both catalogues. Only sources with 5-parameter solutions were used for the frame rotator, which explains why their number is smaller than for Gaia DR2.
-
•
ICRF positions: The International Celestial Reference Frame (ICRF) is a list of the accurate positions of extragalactic radio sources in the International Celestial Reference System (ICRS). The version used for Gaia DR3 is ICRF3 (Charlot et al., 2020, forthcoming), more precisely the subset ICRF3-SX consisting of 4536 sources observed by dual-frequency (S/X band) VLBI. Of these, optical counterparts in Gaia DR3 were identified for 2269 sources, which are also included in the quasar catalogue mentioned above. These sources were used to align the Gaia reference frame to the ICRS as described in Section 4.3.2.
-
•
Radial velocity data: For a small fraction of nearby high-velocity stars, perspective effects due to the motion along the line of sight need to be taken into account in the astrometric solution. In principle, this so-called perspective acceleration can be determined astrometrically, by including an additional source parameter (radial proper motion) in the source update. In practice, however, it is nearly always preferable to take the spectroscopically measured radial velocity, when available, as ‘given’ in the astrometric solution. For Gaia DR3 the effect is taken into account using radial velocities from Gaia’s own Radial Velocity Spectrometer (Section 6.1) whenever available in Gaia DR2. For a small number of nearby stars (mainly white dwarfs) this was complemented by radial velocities from the literature as detailed in Section 4.3.3.
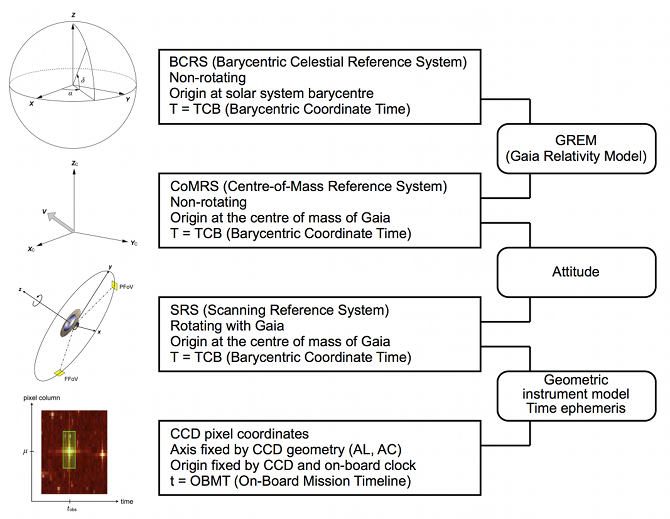
The global astrometric model, which is fitted to the observations and that uses the source, attitude, calibration, and global parameters as unknowns, can be described as a succession of coordinate transformations, as depicted in Figure 4.2. The relevant coordinate systems are:
-
1.
The Barycentric Coordinate Reference System (BCRS) already introduced above. The astrometric parameters of the sources and ephemerides use this reference system, with TCB as the time argument.
-
2.
The Centre-of-Mass Reference System (CoMRS) has its origin at the centre of mass of Gaia, and is co-moving with the satellite, but its axes are still non-rotating and aligned with the ICRS. The observed direction of a source in this reference system is obtained by a complex transformation of the source parameters, which is carried out in a general-relativistic framework by means of the Gaia Relativity Model (GREM; Section 4.1.5).
-
3.
The Scanning Reference System (SRS) is fixed with respect to the optics of the Gaia telescopes and thus rotates with the satellite at an angular velocity of about 60 s. The transformation between CoMRS and SRS is a pure spatial rotation, that is the attitude (Section 4.3.5).
-
4.
The CCD pixel coordinates are used to represent the elementary observations that are input to the astrometric processing (AstroElementaries). The along-scan coordinate is given by the observation time , which is the precise time at which the optical image of a source passes an imaginary ‘observation line’ on the CCD. The across-scan coordinate is the mean pixel column index of the image during the CCD observation. is obtained in OBMT essentially by counting TDI periods, and interpolating to a fraction of a TDI period. It can be transformed to TCB by means of the time ephemeris. Additional data associated with a CCD observation include the field-of-view index (preceding or following), the CCD index, and parameters defining the pixel window used to sample the observation. The transformation between the SRS and the CCD pixel coordinates is given by the geometric instrument model (Section 4.3.6), which describes the geometry of the CCD observation lines in the SRS.
The transformations described above do not explicitly involve the global parameters. Indeed, it is possible to do the astrometric processing without any global parameters. In contrast to the source, attitude, and calibration parameters, which represent very specific models, the global parameters can be used to model arbitrary effects influencing the observations as a function of time, source parameters, etc. This is achieved by means of the generic model described in Section 4.3.7. The global parameters could thus describe effects as diverse as a deviation of the post-Newtonian parameter from unity, systematic velocity errors in the Gaia ephemeris, or periodic variations of the differential optical field distortion. For Gaia DR3 global parameters representing periodic variations of the basic angle and differential field distortion were included as described in Section 4.3.7.
The main processing steps, as shown in Figure 4.1, are:
-
•
Data preparation: This is a collection of processes for selecting, transforming, and sorting the various kinds of data into forms that are suitable for the astrometric global iterative solution. They are described in Section 4.4.1.
-
•
Rate analysis: This step, not foreseen in Lindegren et al. (2012), was first used in the processing for Gaia DR2. The purpose is to determine attitude irregularities on relatively short time scales ( s) by integrating the inertial rotation rate estimated from the successive CCD observations of a given source as it transits the astrometric field. In particular the rapid attitude variations caused by micro-clanks and micro-meteoroid hits are detected and accurately modelled as described in Section 4.3.5. Since the rate analysis can be done without knowing the precise celestial directions to the sources it is part of the AGIS pre-processing and produces the so-called corrective attitude used by AGIS.
-
•
Initial source update: Using a preliminary attitude and calibration, the astrometric parameters were fitted on a source-by-source basis to the observations, using the source update process. The purpose of this was to collect statistical information about sources (number of observations, astrometric weights, goodness-of-fit) needed for the primary source selection. This process was also used to estimate the pseudo-colours of sources (Section 4.3.4).
-
•
Primary source selection: Not every source detected by Gaia will be used to estimate the attitude, calibration, and global parameters, but only a subset of ‘primary’ sources. These should preferably be well-observed, apparently single stars or quasars, with a good distribution in position and magnitude. As described in Section 4.4.1, this process selects a suitable subset of the desired size from the current source list. The astrometric solution for Gaia DR3 used about 14.3 million primary sources, including over 1 million quasars and sources matched to the ICRF catalogues.
-
•
Source update: This process estimates the five astrometric parameters for all non-solar-system sources, based on the AstroElementaries linked to each source. To this end it uses the current values of the attitude, calibration, and global parameters. The source update also determines the down-weighting factors and excess source noise, which make the overall astrometric model robust against outliers and sources that do not fit the standard model of stellar motion (Section 4.1.4). The detailed source model is described in Section 4.3.3 and the source update in Section 4.4.2.
-
•
Attitude update: This process estimates the attitude as function of time, based on all the AstroElementaries of the primary sources, and using the down-weighting factors and excess source noise determined in a previous source update to weight the observations. It uses the current values of the source, calibration, and global parameters. The attitude model is described in Section 4.3.5 and the attitude update in Section 4.4.2.
-
•
Geometric calibration update: This process estimates the geometric calibration parameters based on all the AstroElementaries of the primary sources, using the down-weighting factors and excess source noise determined in a previous source update to weight the observations. The calibration update uses the current values of the source, attitude, and global parameters. The geometric calibration model is described in Section 4.3.6 and the calibration update in Section 4.4.2.
-
•
Global update: This process estimates the global parameters based on all the AstroElementaries of the primary sources, using the down weighting factors and excess source noise determined in a previous source update to weight the observations. The global update uses the current values of the source, attitude, and calibration parameters. It is described in Section 4.3.7.
-
•
Iteration management: As described above, there is a strong interdependence among the source, attitude, calibration, and global update processes, in that each one of them needs the parameters calculated in the other three processes. This dependency is resolved by iterating between the four updates (or three, if global parameters are not used). This can however be done in many different ways, and the convergence of the iteration process depends critically on how it is done. In the simplest case (known as simple iteration), the four processes are just cyclically executed in sequence. Simple iteration is very robust, but may require a very large number of iterations to converge. More sophisticated schemes compute the updates as linear combinations of previous updates, which could speed up convergence considerable. In practise the only scheme used in addition to the simple iteration is the classical conjugate gradient algorithm with a Gauss–Seidel preconditioner, which is well adapted to the way AGIS is organised (Bombrun et al. 2012). The handling of these different schemes is described in Section 4.4.5.
-
•
Reference frame alignment: For five-parameter solutions no prior information about the positions and proper motions of the primary sources is used when computing the astrometric solution. This means that the solution is (almost) undetermined with respect to six degrees of freedom, corresponding to a misalignment with respect to the ICRF which is linearly progressing in time. To prevent this from happening, it is necessary to re-align the provisional reference frame of positions and proper motions, in which the solution is calculated, with the ICRF. The observations of as many quasars as possible are used to make the reference frame kinematically non-rotating, while the positions of the optical counterparts of radio sources in ICRF3 are used to align the axis directions with the ICRS. This process is described in Section 4.3.2.
-
•
Secondary solution: Using the attitude, calibration, and global parameters determined in the primary solution, the astrometric parameters of all the sources are calculated on a source-by-source basis. Normally all five astrometric parameters are obtained, but a fall-back strategy is implemented whereby only the position is obtained where the data are insufficient for an acceptable five-parameter solution. The secondary solution is described in Section 4.4.3.
-
•
AGIS post-processing: This prepares the data for integration into the Gaia Main Data Base (MDB), thus making them available for all other processors. This is described in Section 4.4.4.